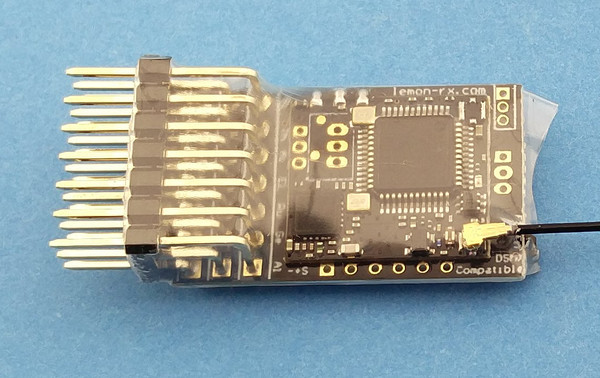
MR001a Bottom
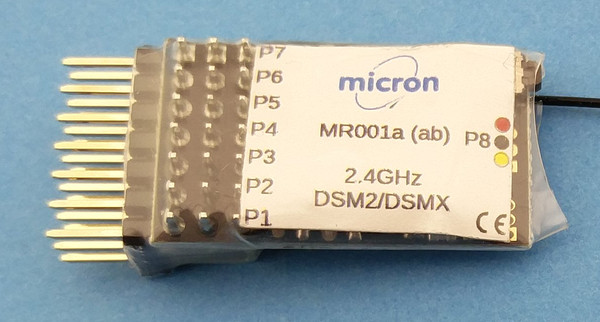
MR001a Top
The MR001a receiver is well suited for use
in large scale live-steam or
battery powered locos. It operates on 2.4GHz using the Spektrum DSM2 or DSMX
protocols; thus it operates just like any other DSM2/DSMX receiver but
includes some useful features for model railway control.
The MR001a is small (30x18x11mm) and space for it is easily
found in most locos.
The MR001 family of receivers includes two hardware variants:
- single extended aerial and manual bind (requires jumper plug for bind)
- two extended aerials for diversity reception (the receiver takes data from the aerial with the strongest signal) and auto bind (receiver goes into bind mode 5 seconds after failing to find a transmitter signal)
and two firmware variants:
| MR001a: | - all outputs configurable as servo, momentary switched or latching switched
- LED2 status can be assigned to any output
- all setup done from transmitter, including servo reversing and travel adjustment
|
| MR001b: | - output configuration fixed at servo on 1-5, forward and reverse lights on 6&7 LED2 on pin 6
- servo reversing and travel adjustment using jumpers on output pins
- no programming from transmitter
|
The MR001a free-air range, when used with a Micron low-power transmitter,
is 40m-50m and approximately 200m when used with
a full-power (100mW) transmitter.
This range will be reduced indoors due to absorption by furniture / fittings
and reflections from metal surfaces.
Range is also reduced if the receiver aerial is in a metal enclosure.
Ideally, the aerial should be placed outside the vehicle body and clear of
any metal.
The active tip of the extended aerial needs to 'see' the transmitter so
should be placed through a hole in the loco body - e.g. into the cab space.
The MR001a aerial should not be cut short or made longer as this will
affect operation of the receiver.
It is important to perform a range check after installation to ensure
you have full control of your loco at all positions around the layout.
Features (top)
- Compatible with all DSM2 and DSMX transmitters with up
to 10 R/C channels, both Micron
model rail and aero model stick type transmitters.
- 3.45V to 8V working voltage range.
- 8 outputs which can be configured for servo/ESC or 0V/3.3V low-current
switched ports.
- All outputs have a 220 ohm series resistor which allows
direct connection of a low-current LED.
- Supports the Deltang Selecta feature
for compatibility with multi-loco transmitters, MR001a must
be manually bound to change Selecta switch position.
- Auto-switched front and rear lights, configurable for centre-off
or low-off throttle on channel 1 (output P1).
- Servo outputs reversible and adjustable end-points.
- Outputs maintain previous setting on signal loss.
- Receiver LED can be repeated to any non-servo output (this is
called the LED2 function).
- Programmable using a transmitter.
Connections and Indicators
MR001a has 7 sets of output pins which can be used for servos or LEDs
for lighting.
The pin sets, numbered from the top of the diagram below, are 0.1"
pitch to take standard R/C plugs.
An additional 8th output for LED or sound card trigger is available via
a JST-ZH socket at the rear of the receiver - this output
cannot be used for connecting a servo as the positive pin is powered
from the on-board 3.3V regulator which has insufficient current
capacity for a servo.
MR001a can be powered from a battery of 3.45V up to 8V;
use of a 4 or 5 cell NiMH rechargeable battery or
the 5V regulated output from a speed controller is typical.
The standard configuration has servo outputs on P1 to P5,
front/rear lighting on P6 and P7 and a channel 3 switched output
on P8:
| P1: | servo on ch1, throttle |
| P2: | servo on ch2, F1 on Tx20, optional servo on ch7
for Selecta transmitters |
| P3: | servo on ch3, toggle switch on Micron tx |
| P4: | servo on ch4, F2 on Tx20 |
| P5: | servo on ch5, bind button on Micron tx |
| P6: | front LED & LED2 |
| P7: | rear LED |
| P8: | idle 0V, 3.3V when ch3 is low (Micron tx toggle down) |
MR001a has 2 LED indicators, one on the top near the aerials and another
on the bottom, these are labeled 'LED RF' and 'LED CPU' on the diagram below.
There are actually
2 LEDs on the bottom, but only one of them is used.
- RF LED:
- indicates when a good signal is received,
flashes rapidly when the rx is in bind mode and
flashes slowly if the receiver power was interrupted
- CPU LED:
- indicates the receiver status:
- flashes slowly after switch on an waiting for a good
transmitter signal
- lights continously when a good R/C signal is being decoded
- flashes twice, pause and repeat when the receiver
is deselected (see Loco Selection)
- used for feedback when programming;
feedback flash patterns comprise a repeated number of flashes
followed by a 1 second pause - this is called a N-flash where N is
the number of flashes, e.g. 3-flash is 3 short flashes,
1 second pause and repeat
Live Steam
For live-steam use, the MR001a outputs can be connected to standard R/C
servos to operate the regulator, reverser, blower, gas valve and whistle.
MR001a will work with any servo that uses a standard (1ms - 2ms) pulse width
control signal and operates off the selected battery voltage
- e.g. Blue Arrow 3gm.
When used with a Micron model rail transmitter,
throttle is on P1/ch1 controlled using the large speed knob and direction
is on P3/ch3 controlled using the toggle switch.
The Micron transmitter should ideally be configured for low-off throttle
with no centre detent and a non-biased direction toggle switch.
When used with an aeromodel type stick transmitter, throttle is controlled
using the throttle stick and direction is controlled by the elevator stick.
Servos, plugged into MR001a P1 and P3, are linked to the regulator
and reverser.
The battery can be connected, via an on/off switch, into any of the unused pins.
Battery Powered Loco
An Electronic Speed Controller (ESC) that supports forward and reverse
should be connected to P1/ch1 as shown in the diagram.
The MR001a is powered from the ESC 5V output.
The resettable fuse is essential to protect the battery in the event
of a ESC or wiring fault. The switch must be capable of carrying the
maximum motor current; if a suitable mechanical switch cannot be found,
an electronic switch should be used instead
(contact Micron
for details).
Any of the Micron model rail transmitters can be used or a
Spektrum compatible stick type transmitter.
Tx21 and Tx22
transmitters have an inertia control which gives a more realistic
acceleration and deceleration by slowing down the rate at which the
throttle channel is changed.
Binding (top)
MR001a must be bound to a transmitter before use. Once bound, MR001a
remembers the transmitter identity and searches for this when it is
switched on.
When binding, we recommend that servo rods are disconnected in
case they are incorrectly set.
Battery powered locos should have the motor unplugged in case
the throttle is not set correctly or the ESC not calibrated for the
throttle off position.
To bind a receiver, it is switched on with no transmitter active
(for normal operation, the transmitter should
be switched on before the receiver).
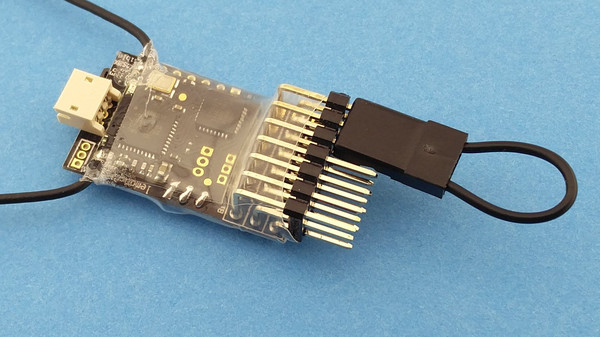
Manual Bind
Some variants of MR001a support autobind where the receiver automatically
goes into bind mode approx 5 seconds after switching on with no pre-bound
transmitter active. If autobind is available, this will be indicated
on the receiver label. All variants support manual binding.
- manual bind:
- The black jumper plug supplied with the receiver is connected
across the signal pins (top row) for P5 and P7 and then the
receiver is switched on. If fitted, P5 servo and P6/P7 LEDs must be
removed when manual binding.
- auto bind:
- The receiver enters bind mode approximately 5 seconds after power-on
if it has either never been bound or it fails to find its
bound transmitter. It is not necessary to remove the
plugs for P5 servo or P6/P7 LEDs when using auto-bind.
Bind mode is indicated by a rapid flashing of the receiver RF LED
and the following steps should be followed to bind with your
transmitter:
- transmitter switched off
- if Loco Selection
is enabled, move the transmitter loco selection switch to
the required position
- switch on the receiver in bind mode (manual or auto)
- only when the RF LED is flashing rapidly, hold down the
transmitter bind button and switch on
- wait for the transmitter to indicate that it is in bind mode and
then release its bind button (the power LED on Micron model rail
transmitters will flash when binding)
- after a short delay, the RF LED should stop flashing and
go dark and, after another 4-5 seconds, both RF and CPU LEDs will
light and stay on
- the receiver is now bound to the transmitter
If the receiver RF and CPU LEDs do not come on solid (no flash) within 10-15 seconds,
the bind process has failed. This can happen for several reasons and does
not normally indicate a fault.
During binding, the receiver searches for
the transmitter's signal and this can be distorted by holding the transmitter
and receiver to close.
So, if you get a bind fail, try again after moving them slightly further apart
or changing the relative orientation of the aerials.
Binding is most reliable when no other 2.4GHz transmitters are turned on.
Loco Selection (top)
Tx22, Tx24 and Tx72 have a 12 way switch to allow control of up to 12 locos - Deltang call this feature 'Selecta'. Using the switch, locos are brought under control one at a time. When not selected, MR001a outputs hold their current setting (e.g. a loco which is moving when deselected keeps moving) and the CPU LED shows a 2-flash pattern.
The implementation of Loco Selection in MR001a is fully compatible with the Deltang Selecta feature and uses R/C channel 2 by default. When Loco Selection is enabled, the controlling R/C channel (e.g. 2) may still be mapped to a servo output but, of course, this will not change as the transmitter switch is rotated.
The receiver has a 800ms delay before enabling when the transmitter Selecta value is changed. This is to avoid obeying the transmitter while the Selecta switch is being moved - e.g. a receiver on Selecta #4 should not change any outputs while the transmitter Selecta switch is moved from #3 to #5.
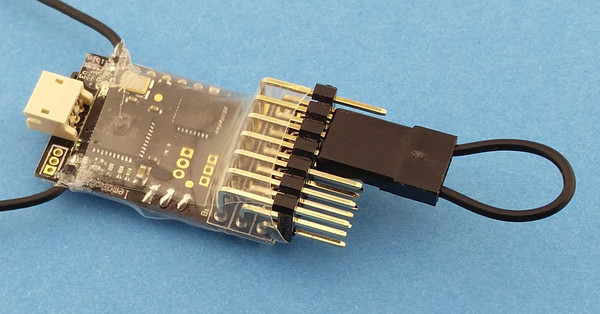
Loco Selection Toggle
MR001a is normally supplied with Loco Selection disabled. To toggle whether Loco Selection is enabled or disabled:
- turn off the receiver and transmitter
- put the black jumper plug on signal pins (top row) for P4 and P6
- switch the receiver ON and the CPU LED will display
- 1-flash if Loco Selection is disabled
- 2-flash if Loco Selection is enabled
- remove the plug and the CPU LED will display a rapid flash until the receiver is switched off
If Loco Selection was enabled, the transmitter's switch value will be saved the next time the transmitter and receiver are switched on. A new selection value can be stored either by performing the above steps again or by manually binding.
Note: prior to version 1.3, a receiver's Loco Selection value cannot be changed using auto-bind - manual bind must be used. You must use manual bind if you want to change the transmitter's Selecta switch position used for a v1.1 or v1.2 MR001a or to re-bind to a different transmitter. From version 1.3, auto-bind may be used to change the Selecta switch position or to bind to a different transmitter.
Loco Selection may also be enabled by programming.
Directional Lighting (top)
Pins P6 and P7 can be used to drive front and rear LED lights;
P6 powers a forward LED and P7 a backward facing LED.
The directional lighting pins can be changed by
programming the receiver.
MR001a has an on-board 3.3V regulator and 220 ohm resistors in series
with the signal pins so limits the LED current to approximately 12mA.
The LED should be connected between the signal and negative pins (top
and bottom rows).
The default setting is for the LEDs to follow the throttle channel with
'centre-off' and is appropriate for a battery loco with ESC.
For live-steam use, the LED behaviour can be reprogrammed for 'low-off' and
this uses full-range throttle on ch1 and directional control on ch3.

Set Throttle Type
To toggle whether the directional LEDs operate as 'centre-off' or 'low-off':
- turn off the receiver and transmitter
- put the black jumper plug across signal pins (top row) P3 and P5
- switch the receiver ON and the CPU LED will display:
- 1-flash for low-off
- 2-flash for centre-off
- remove the plug and the CPU LED will display a rapid flash
until the receiver is switched off
Jumper Changes (top)
This is a summary of the configuration changes that can be made using
a black jumper across the signal pins:
| Manual bind | P5 / P7 |
| Loco Selection toggle | P4 / P6 |
| Throttle centre-off/low-off toggle | P3 / P5 |
Receiver Programming (top)
The type of output for each MR001a pin can be changed using a bound transmitter.
MR001a must first be put into programming mode and then the
direction toggle switch, or elevator on a stick type transmitter,
is used to enter a program sequence one digit at a time.
The CPU LED (and LED2 if enabled) flashes to indicate the value of
the current step in the programming sequence. For example, if the
current value is 4, the CPU LED flashes 4 times, pauses and repeats -
this is called a 4-flash.
The programming table below lists all of the functions that
may be changed by programming the receiver.
The table is split into 3 blocks of related functions each with the
same value in the first column: 1 = core receiver
functions, 2 = servo functions and 3 = general on/off functions.
The table columns contain the program values which must be entered to change
a particular function. For example, to set Loco Selection on
using R/C channel 2,
the program sequence 1, 2, 2, 2 is entered. Each digit of this
program sequence is taken from the columns, left to right:
1 = Core functions
2 = Loco Selection
2 = Loco Selection ON
2 = Loco Selection R/C channel
One function can be changed at a time. The general method is:
- set receiver into programming mode
- enter a program sequence
- repeat until all programming changes have been made
Enter Programming Mode
There are 2 methods of getting the MR001a into programming mode:
- hold the transmitter channel 2 and channel 4 controls at
high or low extremes and then switch the receiver on;
these are the F1 and F2 buttons on a Tx20
the receiver LED will flash rapidly shortly after switch on,
centre the channel 2 & 4 controls
- switch the transmitter and receiver on (they must be bound),
wait 5 seconds without touching any controls and then tap out morse
SOS (... --- ...) on the transmitter bind
button (or toggle the gear switch high to low for a stick transmitter);
- dots (…) will be a quick press of the button and must be
less than 1 second in duration
- dashes (---) must be greater than 1 second and shorter
than 5 seconds – 2 seconds is a reliable time
- the time between each dot or dash must be less than 5 seconds
When programming mode has been successfully entered, the receiver LED
will show a 1-flash - this is the 1 from the first column
of the programming table.
If you do not get the 1-flash, repeat the procedure to enter
programming mode. It usually takes a couple of
attempts to get the SOS method correct if you have never done it before.
Enter a Program Sequence
One programming change requires up to five choices to be made.
These are called 'levels' and each has several options.
They are documented in the programming table below.
Completion of a programming change exits programming mode and requires the
receiver to be placed into programming mode again for the next change.
It is a good idea to write the programming sequence on a piece of scrap
paper and cross off each digit as it is entered so that you
don't lose track of where you are in the sequence.
You always start at the top of the first column and 1-flash is
displayed on entering programming mode.
- The flash count for a level is incremented by setting the
channel 3 control low and back to mid.
- The level value is accepted and the flash count for the next
level is displayed by setting the channel 3 control
high and back to mid.
Most Micron transmitters have a toggle switch on R/C channel 3:
- pushing the switch down sets the R/C channel to a low value
and increments the flash count,
- pushing the switch up sets the R/C channel to a high value,
accepts flash count and moves the program sequence
on to next level or exit programming mode if the current level is
the last in the sequence
Always return the toggle switch to centre after pushing down or up.
Refer to the transmitter user manual for specific information
on the channel 3 control - Tx24 has a rotary control on channel 3.
The receiver LED will flash rapidly while channel 3 is high or low and
then return to a slower repeated flash when channel 3
is back to the middle.
After accepting the flash count for a level, the CPU LED displays
a flash count for the current value of the next level. This could be
higher than 1-flash if the function is set in the receiver configuration
or has been previously programmed. For example:
- the default Loco Selection R/C channel is 2, so a 2-flash will be
displayed after entering 1, 2, 2
- P4 is configured as a servo on channel 4, so a 4-flash will be
displayed after entering 2, 4, 1
When the last level for a sequence has been accepted, the CPU LED
will light continously and the receiver is back in normal operating mode.
The maximum number of levels is 5, but not all sequences use all 5;
if level 5 in the table is blank, the CPU LED will light continously
after level 4 is accepted.
Programming changes are accepted only when the CPU LED lights solid
at the end of the sequence.
If a mistake is made mid way through a sequence,
switch the receiver off to abort.
Programming Example
These examples assume MR001a is in as-received configuration
and a Micron transmitter with toggle switch on channel 3.
Tx24 transmitters have a variable control on channel 3 - the Reverser;
the equivalent actions are:
| Action | Tx with toggle switch | Tx24 type transmitter |
|---|
| Increment flash count: | toggle down | Reverser fully CCW (reverse) and back to centre |
| Decrement flash count: | toggle up | Reverser fully CW (forward) and back to centre |
- Set P6 as servo on R/C channel 6
program sequence: 2, 6, 1, 6
- enter programming mode
- LED shows 1-flash (level 1, 1=core)
- toggle down and release once,
LED shows 2-flash (level 1, 2=servo)
- toggle up and release,
LED shows 1-flash (level 2, 1=P1)
- toggle down and release 5 times,
LED shows 6-flash (level 2, 6=P6)
- toggle up and release,
LED shows 1-flash (level 3, 1=servo)
- toggle up and release,
LED shows 1-flash (level 4, 1=R/C chan 1 - P6 was prevously front light)
- toggle down and release 5 times,
LED shows 6-flash (level 4, 6=R/C chan 6)
- toggle up and release,
LED lights continously and servo on P6 responds to R/C channel 6
- Reverse servo on P3
program sequence: 2, 3, 2, 2
- enter programming mode
- LED shows 1-flash (level 1, 1=core)
- toggle down and release once,
LED shows 2-flash (level 1, 2=servo)
- toggle up and release,
LED shows 1-flash (level 2, 1=P1)
- toggle down and release 2 times,
LED shows 3-flash (level 2, 3=P3)
- toggle up and release,
LED shows 1-flash (level 3, 1=servo)
- toggle down and release once,
LED shows 2-flash (level 3, 2=rotation direction)
- toggle up and release,
LED shows 1-flash (level 4, 1=normal)
- toggle down and release once,
LED shows 2-flash (level 4, 2=reverse)
- toggle up and release,
LED lights continously and servo on P3 rotates in the opposite direction
The number of LED flashes for a Level are shown in
bold:
| Level 1 |
Level 2
Sub-Func or Output Pin |
Level 3
Output Type |
Level 4
Channel or Pin Number |
Level 5
Other Choices |
Information |
1
Core |
1=low or centre off |
1=low-off |
1-10=dir chan |
|
throttle is always channel 1 |
| 2=centre-off |
|
|
|
| 2=Loco Selection |
1=off |
|
|
|
| 2=on |
1-10=Selection chan |
|
enable Loco Selection and save chan value |
| 3=LED2 |
1=LED2 off |
|
|
|
| 2=LED2 progmode |
1-8=P1-P8 |
|
on for programming |
| 3=LED2 prog & Loco Selection |
1-8=P1-P8 |
|
on for programming & loco selection |
| 4=LED2 always |
1-8=P1-P8 |
|
always repeat onboard LED |
|
2
Servo |
1-8=P1-P8 |
1=servo |
1-10=R/C channel |
|
set output as servo |
| 2=rotation direction |
1=normal |
|
normal rotation |
| 2=reverse |
|
reversed |
| 3=end-point adjust |
1=no |
|
|
| 2=confirm |
|
enter end-point setup mode
(see below) |
| 3=reset |
|
reset to default end-points |
|
3
On/Off |
1-8=P1-P8 |
1=momentary |
1-10=R/C channel |
1=idle 0V, Ch low 3.3V |
|
| 2=idle 0V, Ch mid 3.3V |
|
| 3=idle 0V, Ch high 3.3V |
|
| 4=idle 3.3V, Ch low 0V |
|
| 5=idle 3.3V, Ch mid 0V |
|
| 6=idle 3.3V, Ch high 0V |
|
1-8=P1-P8 |
2=latch |
1-10=R/C channel |
1=start 0V, Ch low toggle |
|
| 2=start 0V, Ch high toggle |
|
| 3=start 3.3V, Ch low toggle |
|
| 4=start 3.3V, Ch high toggle |
|
1-8=P1-P8 |
3=auto light |
1=front |
|
|
| 2=rear |
|
|
Servo Throw Adjustment (top)
Servo throws (low and high end points) can be configured using a
bound transmitter, the servo centre position will always be at the mid-point
of the low and high travel.
To adjust a servo, the servo output is selected first
and then the travel adjusted using either the throttle control or
direction toggle if the throttle servo is being adjusted.
The steps below assume a Micron transmitter is being used.
If the transmitter is an aeroplane type stick transmitter then
the elevator stick corresponds to the direction toggle.
- put the receiver into programming mode (see above)
- enter the program sequence 2, P, 3, 2, where P is the output
port number (e.g. 3 for pin 3)
- quickly move the control for the output being adjusted to the
end that needs adjustment:
- use the direction toggle or throttle control to increase
or decrease the servo travel:
- use the throttle control if the direction (R/C channel 3) servo
is being adjusted, or
- hold throttle knob fully CCW to decrease travel
- hold throttle knob fully CW to increase travel
- use the direction toggle for all other servos
- hold toggle down to decrease travel
- hold toggle up to increase travel
the receiver LED will flash twice per second as the servo travel is being
adjusted and stop flashing when the limit is reached.
- centre both controls to finish
the adjustment
Only one servo output can be changed at a time. Go through the
above steps to adjust a different servo output pin.